本次的核心目标是,在两张成像原理、颜色、形态截然不同的图像(H&E与荧光)之间,找到一种可靠的自动对齐方法。
实现方法一:基于稳定解剖结构的特征匹配策略
特征提取(核心创新点):
- H&E图像: 利用胆管腔及背景区域在H&E图像中呈现为高亮度白色的特性,通过高阈值二值化,精确提取其轮廓。
- 荧光图像: 利用同一结构在荧光图像中呈现为无信号黑色的特性,通过低阈值反向二值化,提取其轮廓。
特征优化:
- 使用形态学操作(核大小[kernel_size = 5]去除噪声,并过滤掉面积过小([min_contour_area = 100]的伪影,保证了特征的纯净度。
执行配准:
- 将上述提取并优化后的“特征掩码”作为输入,利用OpenCV的ECC(增强相关系数)算法,该算法对亮度线性变化不敏感,非常适合本场景。
- 我系统性地测试了平移、欧几里得(包含了平移、旋转和等比缩放)、仿射、透视四种变换模型,并最终根据相关系数(CC)指标,选取了最优的变换模型。
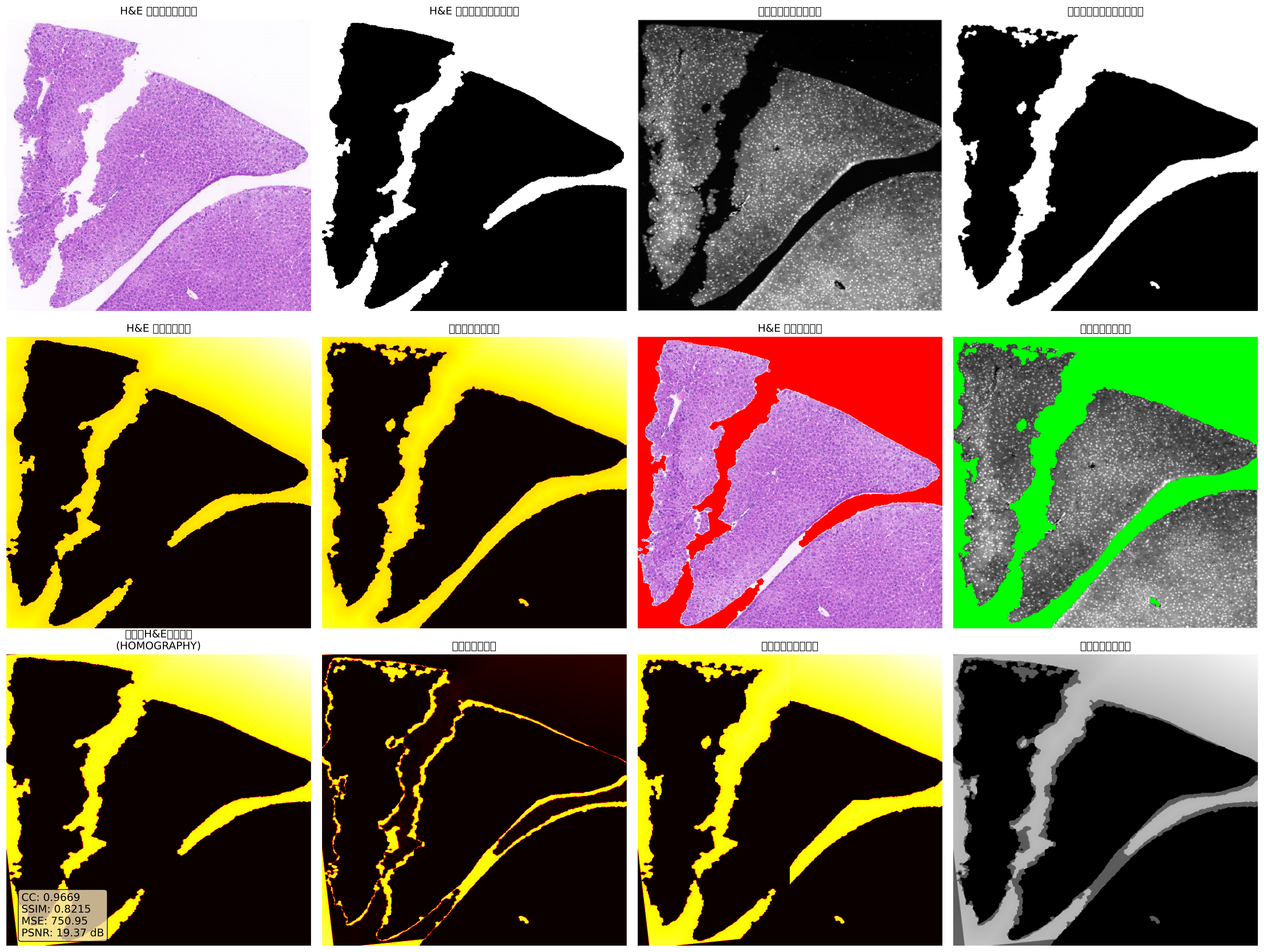
- 第一行:特征提取
- 左侧两张 (H&E): 显示了从原始H&E图中提取出的白色胆管区域(掩码)。
- 右侧两张 (荧光): 显示了从原始荧光图中提取出的黑色胆管区域(掩码)。
- 第二行:特征增强与叠加
- 左二 (增强特征): 展示了经过距离变换和边缘增强后的胆管特征图。这些图像的灰度变化更丰富,纹理更清晰,非常适合ECC算法进行配准。
- 右二 (特征叠加): 将提取的胆管掩码(红色/绿色)叠加在原始图像上,直观地展示了程序识别的“锚点”位置是否准确。
- 第三行:配准结果
- 配准后H&E胆管特征: 这是将H&E的特征图根据计算出的矩阵进行变换后的样子。
- 胆管特征差异图: 将配准后的H&E特征图与荧光特征图相减得到的差异。图像越黑,说明差异越小,对齐效果越好。
- 胆管特征棋盘格对比: 将两张特征图拼接成棋盘格。如果对齐得好,您应该能看到胆管的结构在方格之间是连续的,没有明显的错位。
- 胆管特征叠加效果: 将两张特征图半透明地叠加在一起。如果对齐完美,它们的轮廓会高度重合,形成一个清晰的融合图像。
核心成果与对后续工作的启发
核心成果:
我成功实现了局部图像的全自动、高精度配准。最终在HOMOGRAPHY(透视)模型下,获得了高达0.9669的相关系数(CC),质量评估为“优秀”。我得到了一份精确的3x3变换矩阵,它以数学形式描述了将H&E图像精准对齐到荧光图像上所需的全部几何变换(旋转、平移、缩放、透视)。
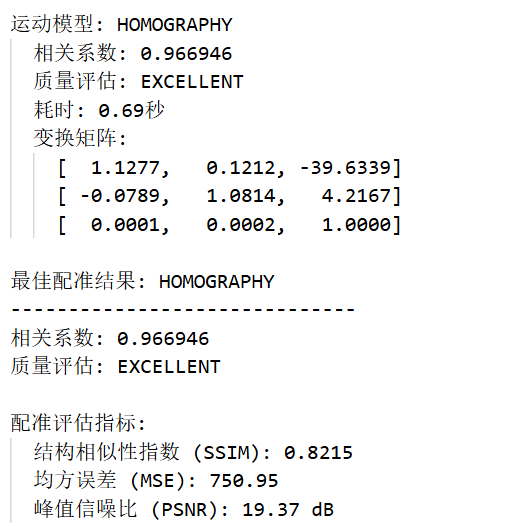
HOMOGRAPHY是本次测试中最复杂、最强大的2D变换模型。它不仅包含平移、旋转、缩放、剪切(这些AFFINE模型也能做到),还能够模拟透视畸变——就像我们从一个倾斜的角度看一个矩形,它会变成梯形一样。- 为什么是它? 在所有四个模型中,
HOMOGRAPHY取得了最高的相关系数(0.966946),尽管只比次优的AFFINE模型(0.964276)高出一点点。这说明,在图像中可能存在极其微小的、非线性的形变(例如组织在切片或放置时产生的轻微褶皱或拉伸),而HOMOGRAPHY模型凭借其更高的自由度,捕捉到了这种细微的畸变,从而获得了最佳的匹配分数。
实现方式二:基于互信息的图像配准方案
我们不直接比较两张图的“颜色”(像素值),因为它们本来就不同。而是采用一种更聪明的策略——**互信息 (Mutual Information)**。
它巧妙地绕开了不同模态图像像素值无法直接比较的难题,转而从统计学的角度寻找最佳对齐,使得该方法具有广泛的适用性和鲁棒性。
工作流程
- 选择工具: 使用强大的医学图像处理库
SimpleITK来执行这个任务。 - 配置配准参数: 详细设置配准过程中的每一个环节,包括:
用什么标准衡量对齐的好坏?**(Metric - 度量标准)**
如何“猜测”移动过程中非整数像素点的值?**(Interpolator - 插值器)**
用什么方法去寻找最佳的对齐位置?**(Optimizer - 优化器)**
允许对图像进行哪些类型的变换(移动、旋转、缩放)?**(Transform - 变换类型)**
- 执行与应用: 启动配准过程,找到最佳变换参数,并将这个变换应用到需要对齐的图像上,生成最终对齐好的图像。
工具库介绍
SimpleITK
作用: 这是实现图像配准的核心工具。它是一个专门为处理和分析多维生物医学图像(2D, 3D, 4D)而设计的开源库。
SimpleITK就像一个装备齐全的“专业地图对齐工作室”。它里面不仅有尺子、量角器(用于测量和变换),还有一套完整的工作流程和自动化设备(配准框架),可以高效、精确地完成地图对齐任务。代码中的ImageRegistrationMethod就是这个工作室里的核心自动化设备。
scikit-image
作用: 一个通用的图像处理库。在配准前后,你可能需要用它进行一些预处理或后处理,比如图像裁剪、降噪、格式转换等。
如果 SimpleITK 是专业工作室,那 scikit-image 就是一个非常方便的“多功能工具箱”。在把地图送进工作室之前,你可能需要用这个工具箱里的剪刀(裁剪)、清洁布(降噪)来整理一下地图。
napari
作用: 一个为科学家设计的、交互式的多维数据可视化工具。在配准任务中,它的作用至关重要:可以非常直观地检查配准前和配准后的效果。你可以将配准前的两张图以不同颜色叠加显示,看到它们是错位的;配准后,再将固定图像和变形后的移动图像叠加显示,检查对齐的精度。
napari就像一个高精度的“数字灯箱”。你可以把两张地图(图像)作为不同的图层放上去,调节每个图层的透明度,放大缩小,来仔细比对河流和城市峡谷是否真的对齐了。没有它,你只能通过数字来判断效果,非常不直观。
CycleGAN
- 作用: 这是一种深度学习模型,属于生成对抗网络(GAN)的一种。它可以学习将一种风格的图像转换成另一种风格,例如,将H&E染色的图像“翻译”成看起来像是DAPI染色的图像。
如果H&E和DAPI图像的差异巨大,以至于互信息这种统计方法也难以奏效时,可以先用CycleGAN将H&E图像伪染成“伪DAPI”图像。这样,配准任务就从“多模态”(H&E vs DAPI)变成了“单模态”(伪DAPI vs DAPI),难度会大大降低。
假设你的“地形图”是黑白素描风格,而“水文图”是彩色油画风格,差异太大导致对齐困难。CycleGAN 就像一位“艺术风格模仿大师”,可以学习素描和油画的风格,然后帮你把黑白的“地形图”重新绘制成一张彩色油画风格的“地形图”。这样你手里就有了两张风格相似的油画,对齐起来就容易多了。
互信息
它不关心像素值的绝对大小,而是关心像素值分布的统计依赖性。
想象一下,一个只会说中文的人(代表H&E图像)和一个只会说英语的人(代表DAPI图像)被关在一个房间里。他们无法直接沟通(像素值无法直接比较)。
但是,如果每次房间里出现“苹果”(H&E图像中出现某个特定范围的像素值)时,那个说英语的人总会说出”Apple”(DAPI图像中对应位置也出现某个特定范围的像素值)。即使你听不懂”Apple”是什么意思,但你观察久了就会发现,“苹果”这个词的出现,可以很好地预测对方会说”Apple”这个词。
互信息就衡量的是这种“预测能力”有多强。如果一个信号(H&E的像素值)的出现,能极大地减少另一个信号(DAPI的像素值)的不确定性,那么它们之间的互信息就很高。
1 | import SimpleITK as sitk |